En esta ocación haremos una breve reseña del siguiente articulo:
Titulo: Vehicular Ad Hoc Networks : A New Challenge for
Localization-Based Systems
Localization-Based Systems
autor: Azzedine Boukerche
Introducción:

Hoy en día existen un sin fin de aplicaciones en el ramo de transportes inteligentes utilizando un tipo de red ad hoc. En este tipo de aplicaciones cada uno de los vehículos están equipados para poder enviar y recibir mensajes entre vehículos. Usando este tipo de redes se puede desarrollar aplicaciones como:
- Advertencia de colisión
- Advertencia de distancias
- Asistencia al conductor
- Control de cruce
- conducción cooperativa
- Estacionarse automáticamente
- Localización
Cada una de estas técnicas requieren técnicas de localización El uso de sistemas de referencias es necesario que los nodos sepan su ubicación física, sus diferentes parámetros y alguna manera de saber donde se encuentran sus próximos vecinos.
Aplicaciones "Vehicular Ad Hoc Networks" (VANETs)
La mayoría de las aplicaciones VANETs tienen la disponibilidad de las diferentes posiciones en tiempo real. Aunque pueden diferir sobre la posición de los objetos esto nos indica que no es exactamente precisa. Estas aplicaciones se dividen con respecto a su utilización.

La mayoría de todas estas aplicaciones necesitan la comunicación entre los vehículos, vehículo carretera,entre otros.
Técnicas de localización para VANETs

Mapa corespondiente:
Los actuales avances en Sistemas de Información Geográfica (SIG) han permitido la recogida y almacenamiento de, así como el acceso a datos geográficos muy precisos, incluso para los dispositivos menos potentes. Esta tecnología se ha aplicado con éxito para almacenar información de mapa de la ciudad en el mapa de localización de los sistemas recientemente desarrollados para la navegación de vehículos . En el Mapa técnica de correspondencia, varias posiciones obtenidas en períodos regulares de tiempo se pueden utilizar para crear una estimación de trayectoria. Esta trayectoria estimada se compara entonces con conocidos datos de los mapas digitales para encontrar la geometría de la ruta más adecuada en el mapa que coincide con la trayectoria. Usando esta técnica, la información de posición (por ejemplo, desde el GPS) se puede representar con precisión en el mapa.
Dead Reckoning:
Mediante el uso de Dead Reckoning, la posición actual de un vehículo puede ser calculado sobre la base de su última ubicación conocida y utilizar dicha información de movimiento como la dirección, la velocidad, la aceleración, la distancia, el tiempo, etc .
Localización celular:
La localización celular aprovecha la infraestructura de telefonía móvil celular presente en la mayoría de los entornos urbanos para estimar la posición de un objeto. Aplicaciones conocidas de esta tecnología incluyen la localización de teléfonos móviles, el seguimiento de los animales domésticos, y la localización de vehículos. Con el fin de funcionar correctamente, los sistemas celulares móviles requieren la instalación de una infraestructura de comunicación compuesto por una serie de estaciones de base celulares distribuidos a través de la zona cubierta.
Imagen / procesamiento de vídeo:
De imagen, fuentes de información de vídeo y técnicas de procesamiento de datos también se pueden utilizar para fines de localización, especialmente en sistemas de guiado de robots móviles. En algunos casos, sin embargo, las cámaras ya están disponibles en los sistemas de seguridad implementados en los estacionamientos y túneles. Por lo general, estas técnicas de procesamiento de imágenes / vídeo se utilizan para alimentar a los algoritmos de fusión de datos para estimar y predecir (pista) la ubicación de un vehículo De hecho, la imagen y la información de víideo son fuentes reales de las que se puede calcular los parámetros de ubicación de un vehículo.
Distribución relativa en la localización ad hoc:
Los mapas de posición relativa locales pueden ser construidos por un vehículo mediante la estimación de las distancias entre sus vecinos y el intercambio de esta información de distancia con nodos cercanos en la comunicación multisalto. Con esta dinámica la posición del mapa, un vehículo puede situarse en relación a los vehículos cercanos, así como localizar los vehículos en sus proximidades (Fig. 3G). Este tipo de localización relativa se ha utilizado sobre todo en el modo Ad Hoc y redes de sensores, pero recientemente una serie de soluciones se ha propuesto para VANETS.
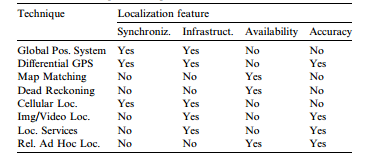
Comparación de técnicas
Todas estas técnicas de localización estudiados tienen sus pros y sus contras. La Tabla 2 compara brevemente estas técnicas. Como podemos ver en la tabla, a pesar de varias soluciones interesantes, en el fondo ninguno de ellos satisface todos los requisitos de las aplicaciones criticas al mismo tiempo, como estar disponible en cualquier lugar y en cualquier momento, con cálculos precisos de posición y que sea fiable. Por estas razones, uno de los problemas más interesantes que resuelve VANETS es como proporcionar un sistema de localización en cualquier momento y en cualquier lugar, de grano fino y confiable para ser utilizado por los vehículos Un requisito en cualquier momento significa que el sistema de localización debe estar libre de demoras al calcular las posiciones actuales de los vehículos (por ejemplo, sin demora de inicio).
Fusión de datos en los sistemas de localización VANETS
La fusión de datos puede ser definida simplemente como la combinación de múltiples fuentes de información para obtener una mejor. LA fusión de datos se utiliza comúnmente en las tareas de detección y clasificación de diferentes dominios de aplicación, como la robótica y aplicaciones militares. Últimamente estos mecanismos se han utilizado en las aplicaciones previamente impredecibles, tales como detección de intrusos y la denegación (DoS) de detección de Servicio.
Un modelo de fusión de datos es posible
Técnicas de fusión de datos, tales como filtros de Kalman, filtros de partículas y Teoriía de Creencias también se han utilizado para mejorar las estimaciones de localización en muchos sistemas basados en sensores. La idea general detrás de un sistema de localización basado en la fusión de datos es la combinación de varias fuentes de información para proporcionar una estimación de localización precisa.
Teóricamente, las técnicas de fusión de datos se pueden utilizar en casi todas las etapas de un proceso de estimación de posición para VANETs. Este modelo tiene los siguientes componentes:
- Fuentes Rango: Hay varias fuentes de datos posibles que pueden proporcionar estimaciones de distancia, como el ultrasonido, láser, RSSI, Toa, y TDoA. Estas fuentes rango pueden ser desplegados en la carretera, en vehículos y en edificios cercanos.
- Fusión Intervalo: Cada fuente de rango puede incrustar un cierto nivel de ruido. En este contexto, todas las estimaciones de distancia disponibles pueden estar fusionados (filtrada) para reducir el ruido incorporado. Datos de los métodos de estimación de fusión, como media móvil, Kalman y filtros de partículas.
- Rango basado en estimación: Una vez que tengamos una estimación de la distancia fusionado, podemos utilizar esta información para calcular la posición del vehículo mediante el uso de, por ejemplo, un proceso de multilateralización.
- Rango libre de estimación: De vez en cuando, un sistema de localización de corral puede ser utilizada como información complementaria para complementar las otras estimaciones de posición disponibles.
- Dispositivos GPS: En VANETS es razonable suponer que varios vehículos están equipados con GPS porque el costo asociado se reduce en comparación con el coste global de un vehículo Por lo tanto, estos dispositivos pueden ser utilizados para proporcionar información de la posición (y orientación) siempre que sea posible (es decir, los satálites deben ser alcanzable).
- Orientación de fuentes: Tales fuentes informan la dirección de movimiento y la orientación de un vehículo. Se puede estimar mediante la recopilación de información de vecinos (es decir, otros vehículos o lugares destacados a lo largo de las carreteras).
- Orientación de fusión: cuando varias fuentes de orientación son disponibles, que se pueden refinar mediante el uso de una técnica de fusión. Una vez más, los métodos de estimación, tales como promedio móvil, mínimos cuadrados, de Kalman, y filtros de partículas son adecuados para este componente.
- Velocidad de fuentes: Fuentes potenciales de velocidad son los vehículos odómetros (incluyendo un vehículo vecino) y la carretera odómetros (usados, por ejemplo, para comprobar si o no un vehículo respeta los límites de velocidad).
- Velocidad de fusión: Una vez más, los datos de fusión se puede aplicar para aumentar la estimación de la velocidad cuando se dispone de múltiples fuentes. Para la fusión velocidad, los métodos de estimación como Kalman, mínimos cuadrados, y filtros de partículas son apropiados para este componente también.
- Posición de fusión: Este es un elemento clave. En VANETs, el problema de localización incorpora el problema de seguimiento ya que los vehículos se mueven y por lo general, en función de la velocidad de movimiento, una simple estimación de la posición (sin predicción) puede ser inmediatamente fuera de la fecha.
- Contexto de fusión: La información de contexto se puede fusionar con estimaciones de posición para mejorar la precisión
- Posición final: Una vez que se sabe, la posición correcta debe retroalimentación del componente de fusión Posición para permitir.
Conclusiones
En este trabajo, los sistemas de localización fueron estudiados desde el punto de vista de las redes ad hoc vehiculares (VANETs). Se muestra como los receptores GPS, la fuente más común de información de localización en VANETs, pueden llegar a ser errónea o no está disponible en un número de situaciones. Luego se discutio como estos errores de localización pueden afectar a las aplicaciones Vanet. Un número de otros sistemas de localización disponibles para su uso en vehículos para estimar sus posiciones: Mapa Matching, Callejón sin salida, localización celular, Imagen / procesamiento de vídeo, servicios de localización, y la localización relativa Distributed Ad Hoc. Todas estas técnicas tienen sus pros y sus contras. En este artículo se argumenta que los sistemas de localización de futuros para VANETs son susceptibles de utilizar algún tipo de técnica de fusión de datos con el fin de proporcionar información sobre la posición de los vehículos que es preciso y lo suficientemente robusta como para ser aplicado en aplicaciones críticas Vanet. A continuación, muestran como las técnicas de fusión de datos se pueden utilizar para calcular una posición precisa sobre la base de un número de estimaciones de posición relativamente inexactos.
Referencias:
"Vehicular Ad Hoc Networks: A New Challenge for Localization-Based Systems" |Azzedine Boukerche, , Horacio A.B.F. Oliveira, Eduardo F. Nakamura, Antonio A.F. Loureiro | |2008 | http://www.csie.ntpu.edu.tw/~yschen/course/96-2/Wireless/papers/Location-1.pdf
El mismo comentario que puse a Ramón. 7 pts.
ResponderEliminar